GradientPolicy is a SoftMax type algorithm, based on Sutton & Barton (2018).
Usage
policy <- GradientPolicy(alpha = 0.1)
Arguments
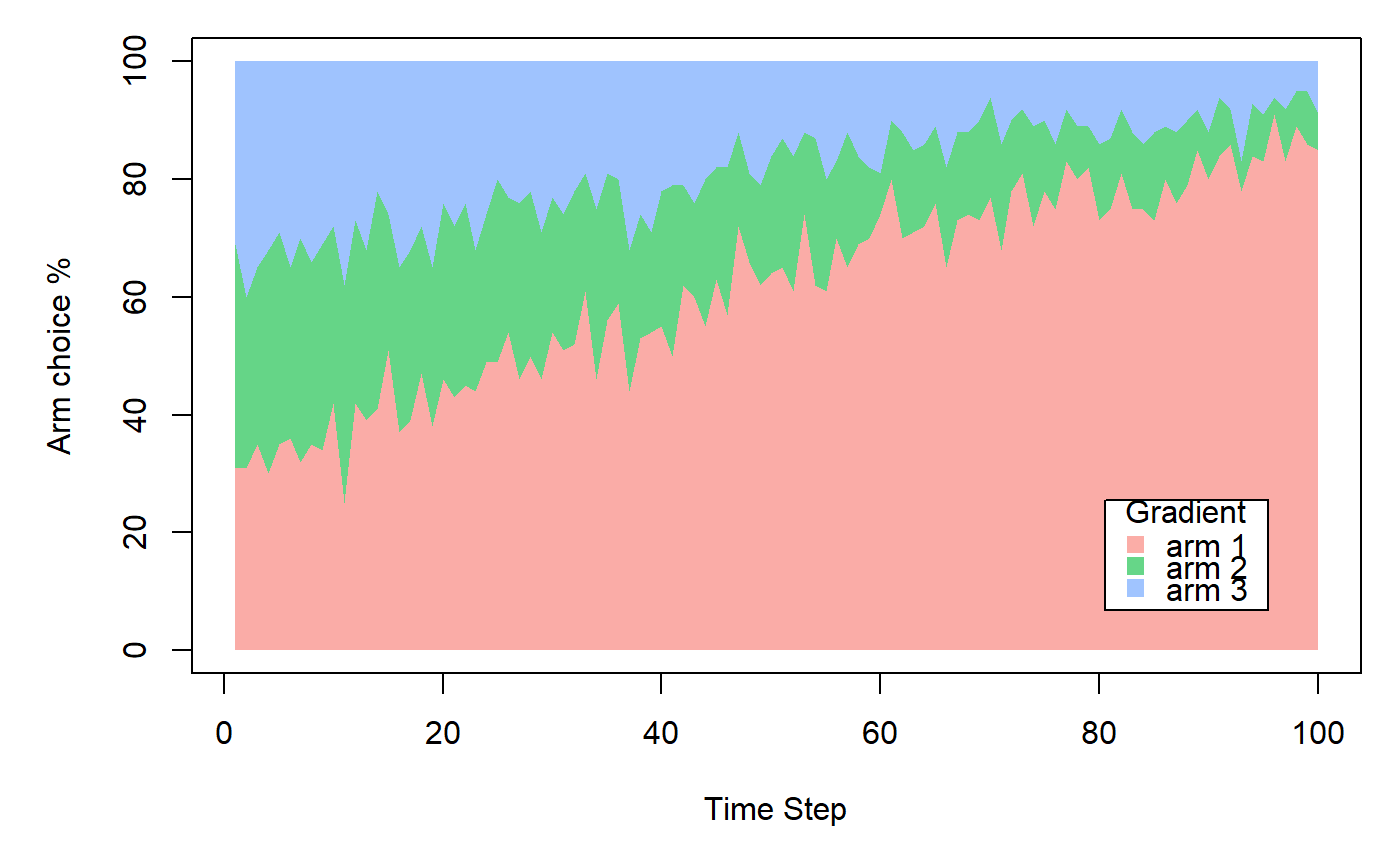
alpha = 0.1double, temperature parameter alpha specifies how many arms we can explore. When alpha is high, all arms are explored equally, when alpha is low, arms offering higher rewards will be chosen.
Methods
new(epsilon = 0.1)Generates a new GradientPolicy object. Arguments are defined in
the Argument section above.
set_parameters()each policy needs to assign the parameters it wants to keep track of
to list self$theta_to_arms that has to be defined in set_parameters()'s body.
The parameters defined here can later be accessed by arm index in the following way:
theta[[index_of_arm]]$parameter_name
get_action(context)here, a policy decides which arm to choose, based on the current values of its parameters and, potentially, the current context.
set_reward(reward, context)in set_reward(reward, context), a policy updates its parameter values
based on the reward received, and, potentially, the current context.
References
Kuleshov, V., & Precup, D. (2014). Algorithms for multi-armed bandit problems. arXiv preprint arXiv:1402.6028.
Cesa-Bianchi, N., Gentile, C., Lugosi, G., & Neu, G. (2017). Boltzmann exploration done right. In Advances in Neural Information Processing Systems (pp. 6284-6293).
See also
Core contextual classes: Bandit, Policy, Simulator,
Agent, History, Plot
Bandit subclass examples: BasicBernoulliBandit, ContextualLogitBandit,
OfflineReplayEvaluatorBandit
Policy subclass examples: EpsilonGreedyPolicy, ContextualLinTSPolicy
Examples
horizon <- 100L simulations <- 100L weights <- c(0.9, 0.1, 0.1) policy <- GradientPolicy$new(alpha = 0.1) bandit <- BasicBernoulliBandit$new(weights = weights) agent <- Agent$new(policy, bandit) history <- Simulator$new(agent, horizon, simulations, do_parallel = FALSE)$run()#>#>#>#>#>#>#>