Parent or superclass of all {contextual} Policy subclasses.
Details
On every t = {1, ..., T}, a policy receives d dimensional feature vector or
d x k dimensional matrix
context$X*, the current number of Bandit arms in context$k, and the current
number of contextual features in context$d.
To make sure a policy supports both contextual feature vectors and matrices in context$X, it is
suggested any contextual policy makes use of contextual's get_arm_context(context, arm)
utility function to obtain the current context for a particular arm, and get_full_context(context)
where a policy makes direct use of a d x k context matrix.
It has to compute which of the k
Bandit arms to pull by taking into account this contextual information plus the policy's
current parameter values stored in the named list theta. On selecting an arm, the policy then
returns its index as action$choice.
On pulling a Bandit arm the policy receives a Bandit reward through
reward$reward. In combination with the current context$X* and action$choice,
this reward can then be used to update to the policy's parameters as stored in list theta.
* Note: in context-free scenario's, context$X can be omitted.
Usage
policy <- Policy$new()
Methods
new()Generates and initializes a new Policy object.
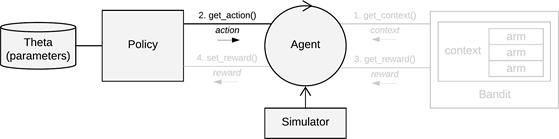
get_action(t, context)arguments:
t: integer, time stept.context: list, containing the currentcontext$X(d x k context matrix),context$k(number of arms) andcontext$d(number of context features)
theta
and the current context. Returns a named list containing
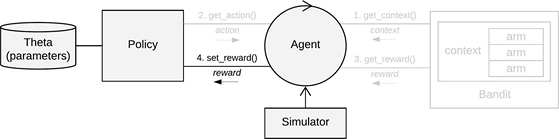
action$choice, which holds the index of the arm to play.set_reward(t, context, action, reward)arguments:
t: integer, time stept.context: list, containing the currentcontext$X(d x k context matrix),context$k(number of arms) andcontext$d(number of context features) (as set bybandit).action: list, containingaction$choice(as set bypolicy).reward: list, containingreward$rewardand, if available,reward$optimal(as set bybandit).
theta.post_initialization()Post-initialization happens after cloning the Policy instance number_of_simulations times.
Do sim level random generation here.
set_parameters()Helper function, called during a Policy's initialisation, assigns the values
it finds in list self$theta_to_arms to each of the Policy's k arms.
The parameters defined here can then be accessed by arm index in the following way:
theta[[index_of_arm]]$parameter_name.
See also
Core contextual classes: Bandit, Policy, Simulator,
Agent, History, Plot
Bandit subclass examples: BasicBernoulliBandit, ContextualLogitBandit,
OfflineReplayEvaluatorBandit
Policy subclass examples: EpsilonGreedyPolicy, ContextualLinTSPolicy